AvatarSim
Multi-Agent System for Emergency Response and Decision Making
___________________________________________________________HOME________________________________________________________
Dr. Sharad Sharma’s research focus is on modeling and simulation of multi-agent systems for emergency response and decision making strategies. His work is motivated by the need of research in real-time agent navigation for reaching a goal in emergency situations like evacuation. Dr. Sharma’s proposed human behavior system integrates both artificial intelligence and fuzzy logic parameters. Fuzzy logic is used in refining human emotional behavior by including fuzzy behavioral characteristics such as stress, panic, smoke and anger. He has proposed a research tool AvatarSim that is developed in Java framework and can be displayed on a web browser. The model is extended to simulate battlefield scenarios and airplane evacuation scenarios. He has also combined learning and adaptive behavior by integrating Genetic Algorithm (GA) with Neural Networks (NN) to explore how intelligent agents can look for exits during an evacuation.
This research work is motivated by the need of research in real-time agent navigation for reaching a goal in emergency situations like evacuation. Unfortunately, little attention is given to topic of human navigation as compared to robot navigation. The proposed human behavior system integrates both artificial intelligence and fuzzy logic parameters. Fuzzy logic is used in refining human emotional behavior by including fuzzy behavioral characteristics such as stress, panic, smoke and anger. The work also proposes a fuzzy and neuro fuzzy application for predicting the probability of an agent to reach its destination when fuzzy behavior characteristics like stress, panic are involved. The work extends the application to simulate battlefield scenario and airplane evacuation scenario.
This research study investigates modeling strategies to simulate human egress behavior in emergency scenarios and represent them in a goal-finding computer application. Engineers and planners have to often make decisions regarding how design will affect the behavior of occupants. One way of addressing this problem is to develop a tool that can analyze and relate the behavior of people to design parameters. The question that arises is - to what extent could this simulation model of pedestrian movement accurately support design decision-making?
Click on figure to Load the Applet
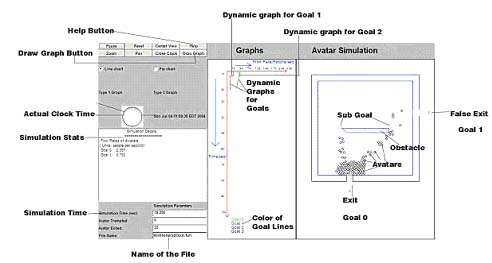
The features of the Graphical User Interface are presented in the above figure. The features include: buttons, file name, image, current time, current date, simulations stats, simulation time, name of the input file, dynamic graphs for each goal, avatars, walls, obstacles, and exits. The above example shows layout of a simple room with an obstacle in the center, a false goal (1), and an door (goal 0). The input file has 50 avatars at speed .05, .25 (min, max) and 70 avatars at speed 0.25, 0.45.
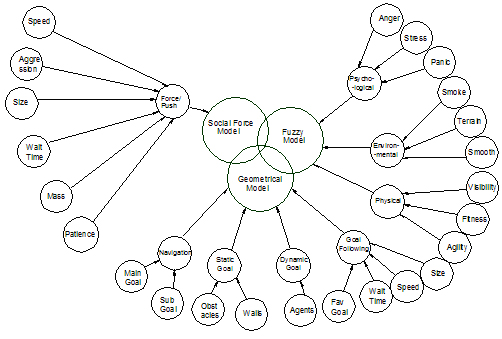
The AvatarSim model comprises of three models as described in the Fig.1. The three models are:
1. Fuzzy Agent-based
Model
2. Geometrical Model
3. Social Force Model
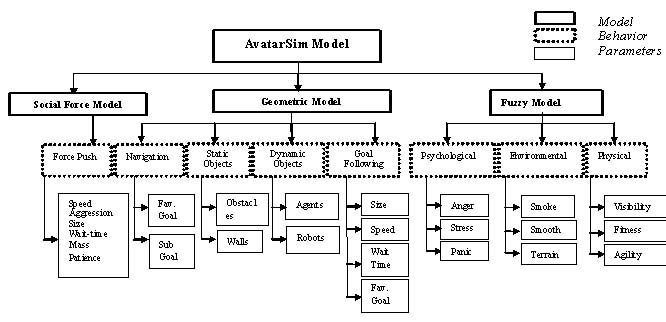
Fig. 1: Classification of AvatarSim Model, View Model 2
Fuzzy logic is structured that approximates a function through linguistics input/output associations. Fuzzy behaviour in AvatarSim model includes the following three behaviour patterns which cannot be quantified numerically for agents:-
1.
Psychological factors: Anger, Stress, Panic
2. Environmental factors: Smoke,
Terrain, Smoothness
3. Physical factors: Observer
Visibility, Fitness, Agility
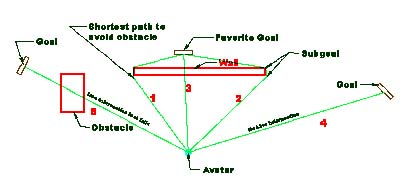
The research work also involves the design of a collision-avoidance algorithm that realistically models the behavior of people using the choice of exit (favorite goal) and sub goals (intermediate goals). Sub goals are placed at each end or intersection of a line in the simulation environment. The distance the sub goal is placed from the end of line is a variable, “sub goal radius” that can be set in the input file. A path algorithm is used to navigate around obstacles using a sub goal method.
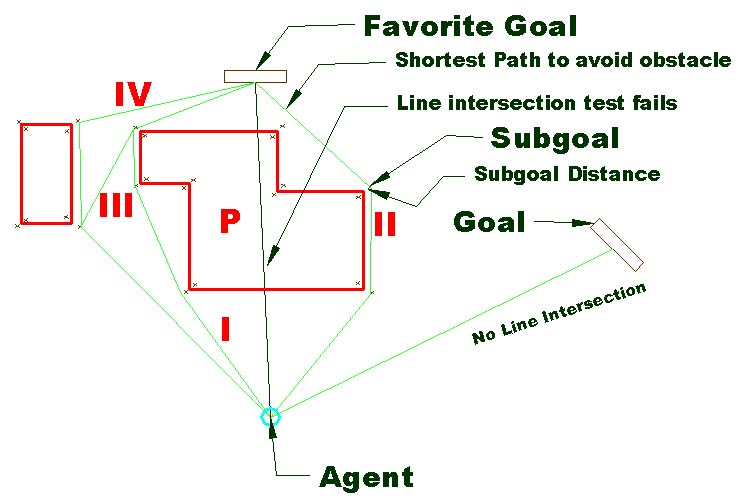
Fig. 2: Obstacle avoidance algorithm using favorite goal and sub-goal, view 2
The AvatarSim model considers both detouring and speed modifications in the avoidance patterns. Sub-goal system is developed to allow people to effectively navigate around obstacles. The system introduces the notion of agent hierarchy and inter-agent behavior relationship and thus allows a group of agents to be dynamically assembled into a single movable mass. It provides a powerful method to construct a distributed application. Refining of the simulation is done by incorporating fuzzy parameters for agents.
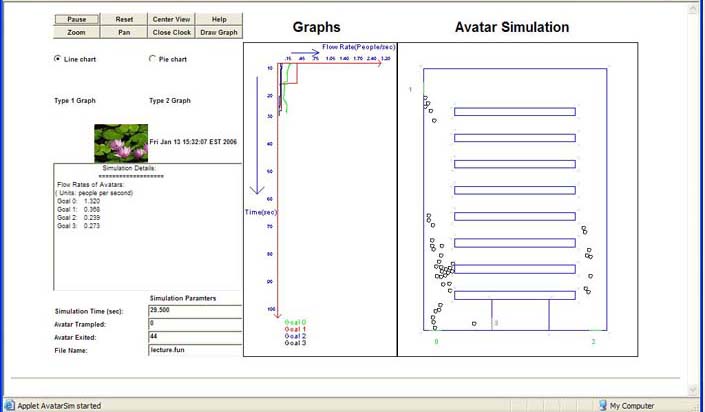
The above applet shows Taubman College of Architecture Lecture hall at University of Michigan, Ann Arbor. The screen shot depicts the simulation in which 90 avatars are inside the Lecture hall with chairs as obstacles. There are three exits (goal 0, 1 and 2) one in front, two behind and a false opening (goal 3).The false opening leads to the projector room.
Aircraft Scenario
Computer based mathematical model play a critical role in aircraft evacuation scenarios as it leads to implementation of safety criteria’s, cabin crew training and prediction of potential accidents. Fig 2 represents the modeled A 319 aircraft in AvatarSim which consists of 138 passengers. There are three exits on either side of the plane. The scenario was modeled based on real time data from A 319 aircraft which has 33.84 m overall length and 3.70 m cabin width. The aircraft scenario depicted in Fig. 3 consists of dynamic obstacles such as aircraft crew, passengers, and static obstacles such as seats and walls.
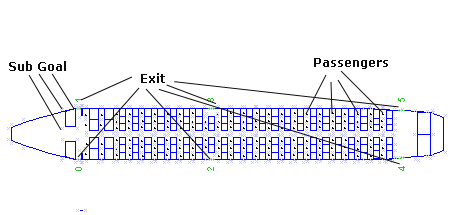
Fig. 2: AvatarSim simulation for the airplane, A 319 aircraft - 138 passengers
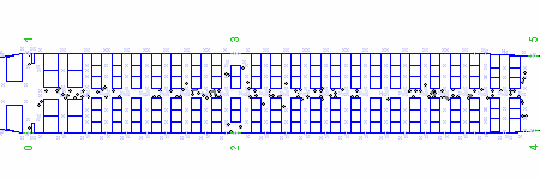
Fig. 3: Congestion as evacuation begins
The simulation helps in predicting total time the passengers will take to reach an exit taking into account human behavior characteristics. An overall time of 44 sec is obtained for an A 319 aircraft having 138 passengers. The human behavior characteristics can be defined for both crew and passengers through the use of input file.
Battlefield Scenario
Soldiers are not robots and their movement depends upon their human emotional behavior. Soldiers move in small group (platoons) along a line to random destinations in a battlefield. Through simulations we study the performance and total time taken for soldiers to reach an outpost. In AvatarSim model, it is assumed that soldiers know their initial location via Global Positioning System (GPS) and map of the location prior to entering the battlefield.
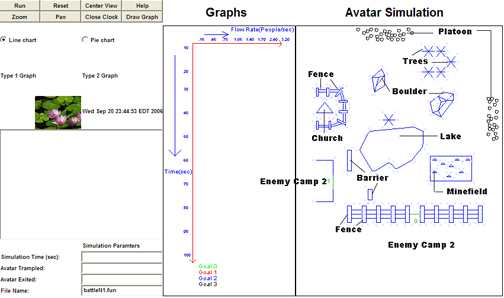
Fig. 4: Battlefield scenario in AvatarSim showing multiple platoons (agents) multiple outpost (goal)
The battlefield scenario depicted in Fig. 4 consists of two enemy outposts, two platoons of soldiers, minefields, barriers as obstacles. The battlefield scenario is an extension of proposed favorite goal algorithm. The platoons are assigned an enemy outpost as a favorite goal to simulate the various scenarios. The simulation helps in predicting total time a platoon will take to reach an enemy post taking into account human behavior characteristics. The human behavior characteristics can be defined for both soldiers and platoons through the input file. There can be four possible scenarios
• SISO
(Single Input Single Output): Single platoons (agents) single outpost (goal)
• SIMO (Single Input Multiple
Output): Single platoons (agents) multiple outpost (goal)
• MISO (Multiple Input Single
Output): Multiple platoons (agents) single outpost (goal)
• MIMO (Multiple Input Multiple
Output): Multiple platoons (agents) multiple outpost (goal)
Lecture Hall at Wayne State University Scenario
A lecture hall at Wayne State University was considered where 50 students were used for the study. The students in the study were questioned for various fuzzy variables like: stress, panic, anger, visibility before the evacuation drill was performed. As the evacuation drill was performed on the day of final project presentation for an engineering class, therefore stress level was visibly high. As a result, more comprehensive data set was obtained for the human emotional behavior parameters. This data was incorporated in the AvatarSim for simulation. Fig. 5 represents the corresponding simulation in AvatarSim model.
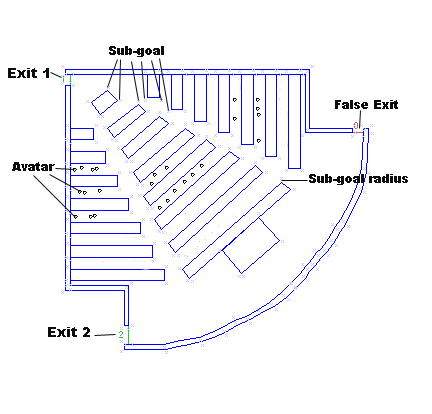
Fig. 5: AvatarSim applet displaying the lecture hall
In contrast to evacuation exercise a simulation allows to do as many simulations as one wants. Thus, the statistical properties in distribution of egress time can be investigated. For this study the data from the real-time evacuation drill was compared to the AvatarSim simulation results. The results from the evacuation drill experiment showed a mark difference in the time for the route to exit 2 where the queue occurred in both simulation and exercise. Also the difference between simulation and exercise was found to be very small and flow rate was constant in both the cases. The behavioral characteristics of an agent such as speed, wait time, stress, panic, preference of goal can be adjusted to simulate a real time scenario. It is believed that once the behavioral parameters of an agent are adjusted for one scenario to depict a person, the same behavior can be transported into a new scenario. The future work will involve studies of training an agent to represent a person’s behavioral characteristics and performing multiple exercises in multiple scenarios.
Related Publications:
A) Journal paper
B) Conference papers
Copyright © Sharad Sharma., All Rights Reserved
{kind=link}
{kind=link}